前言
某天在知乎上刷到了一个很有意思的GPU并行编程学习仓库,叫GPU-Puzzles,通过解谜+可视化的方式学习并行编程,使用Python就可以实现CUDA核函数,并且可以观察线程和数据的对应关系,对于初学者而言非常友好。仓库链接,花了一个下午全部解出来了,以下记录下我的题解和对于题目的分析理解。
题解
Puzzle 1
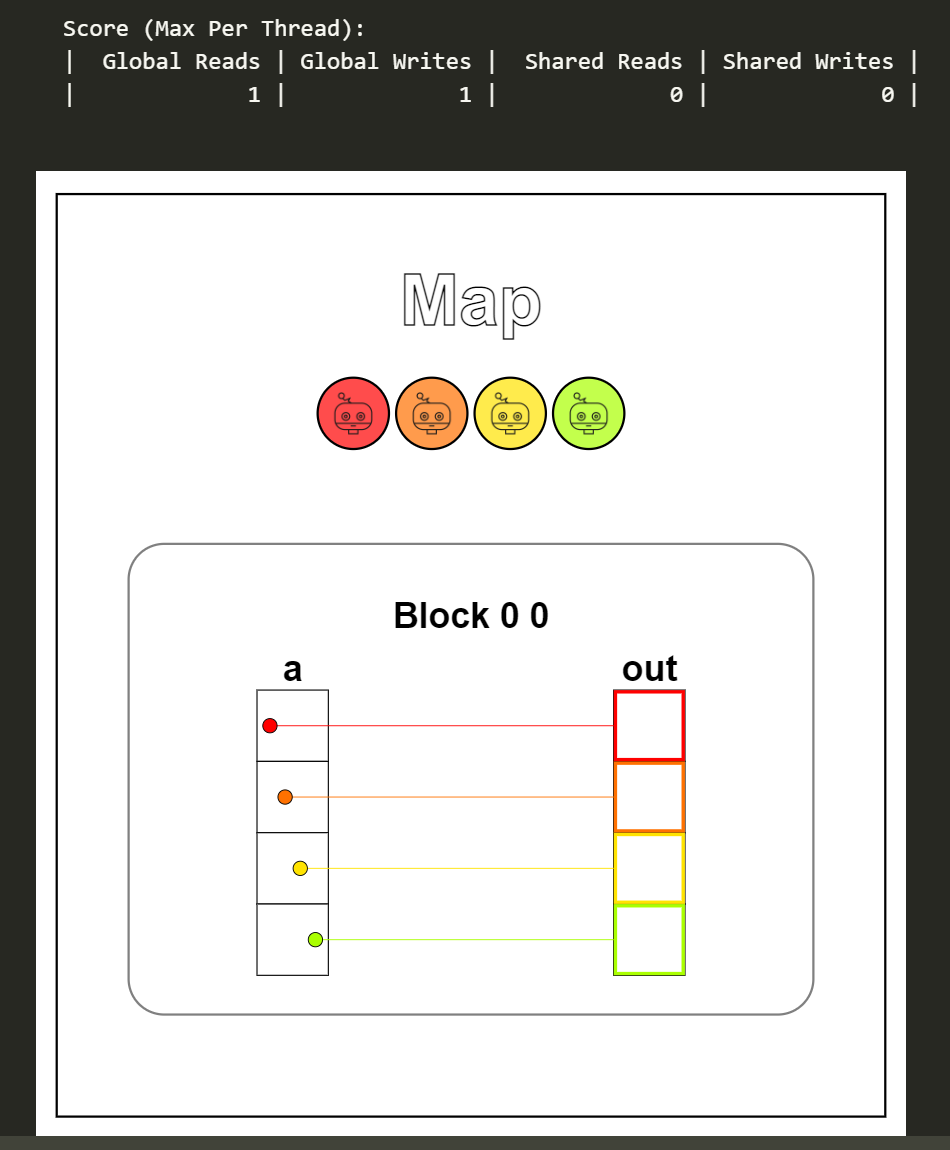
题目:Map。签到题,顾名思义就是映射,题目保证线程数量与数据量一致,因此数据与线程是一对一的关系,一条线程对应处理一个数据即可。
1
2
3
4
5
6
7
| def map_test(cuda):
def call(out, a) -> None:
local_i = cuda.threadIdx.x
out[local_i] = a[local_i] + 10
return call
|
下图便是本题的可视化结果,可以看到每一条线程从数组a中读取一个数据,+10后写到out数组中,完成映射操作,全局内存上读和写的次数是一样的。
Puzzle 2
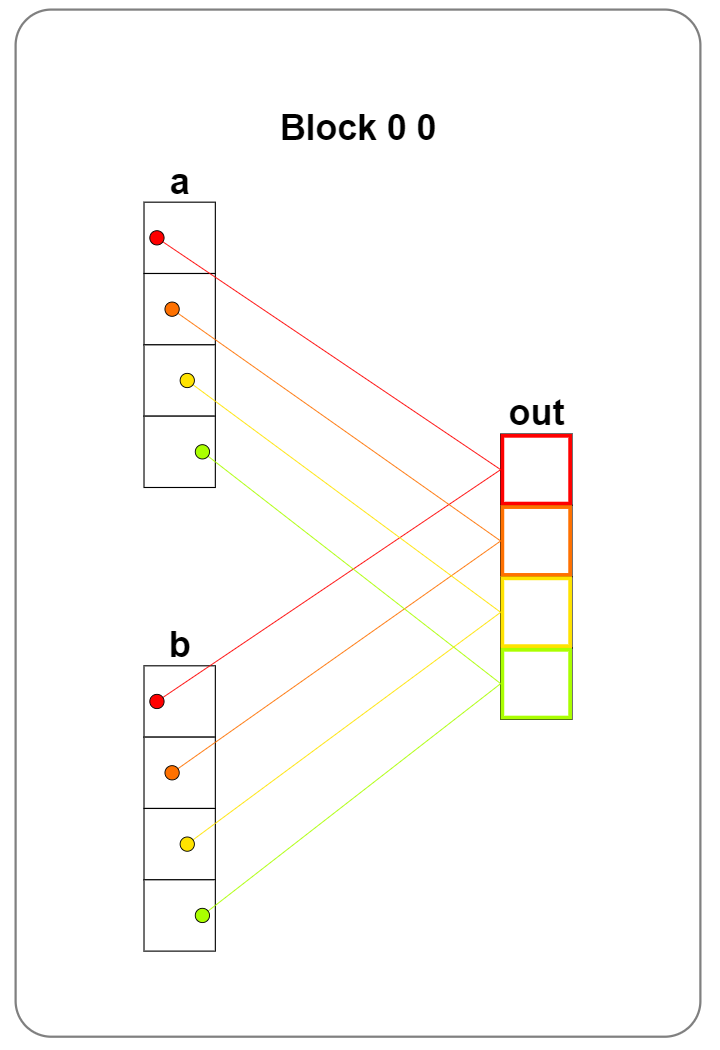
题目:Zip。可以理解为组合,将数组a和b中每一个元素相加,结果储存在out中,题目保证线程数量与数据量一致,因此数据与线程仍然是一对一的关系。
1
2
3
4
5
6
| def zip_test(cuda):
def call(out, a, b) -> None:
local_i = cuda.threadIdx.x
out[local_i] = a[local_i] + b[local_i]
return call
|
从可视化结果可以看到一条线程分别从a和b中读取一个数据,相加后写到out中,全局内存上读的次数是写的两倍。
Puzzle 3
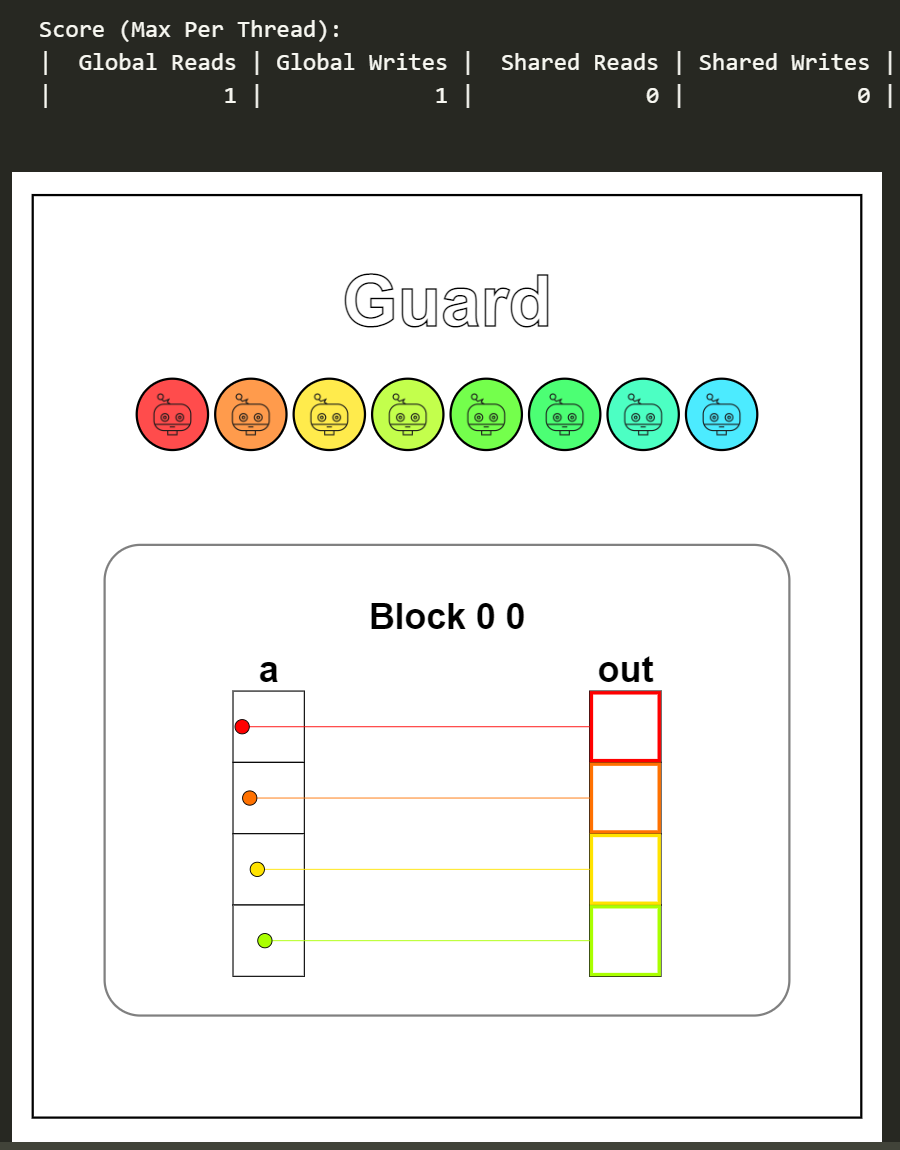
题目:Guard。从这题开始,题目就更符合并行编程下实际的情景了,线程的数量一般情况下是与数据量不相等的,在读写操作前,我们需要判断某条线程是否需要进行读写操作,以防出现越界或重复计算等错误。
1
2
3
4
5
6
7
| def map_guard_test(cuda):
def call(out, a, size) -> None:
local_i = cuda.threadIdx.x
if local_i < size:
out[local_i] = a[local_i] + 10
return call
|
这题的可视化结果看不出if local_i < size:判断有什么作用,实际上线程的数量是要多于数据量的,多出的这部分线程没有进行任何的操作。
Puzzle 4
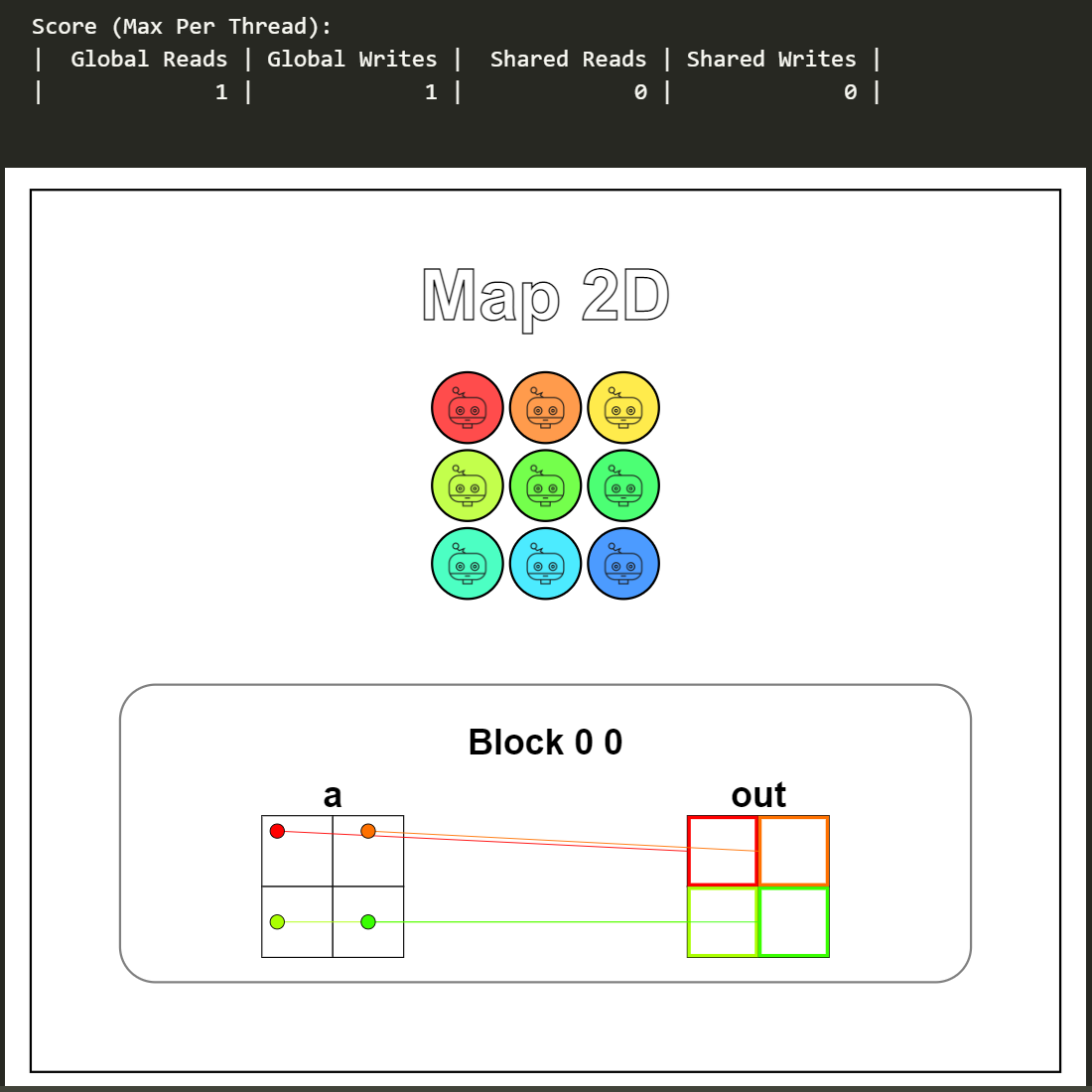
题目:Map 2D。本题是第一题的二维扩展版,在CUDA编程中,一个Grid可以有3维Block,一个Block可以有3维Thread。当启动核函数配置为多维Block或多维Thread时,我们需要稍微修改一下线程的索引方式。
1
2
3
4
5
6
7
8
| def map_2D_test(cuda):
def call(out, a, size) -> None:
local_i = cuda.threadIdx.x
local_j = cuda.threadIdx.y
if local_i < size and local_j < size:
out[local_i, local_j] = a[local_i, local_j] + 10
return call
|
从可视化结果可以看到,一条线程对应二维数组上的一个数据,同样的,没有参与数据读写操作的线程并没有画出来。
Puzzle 5
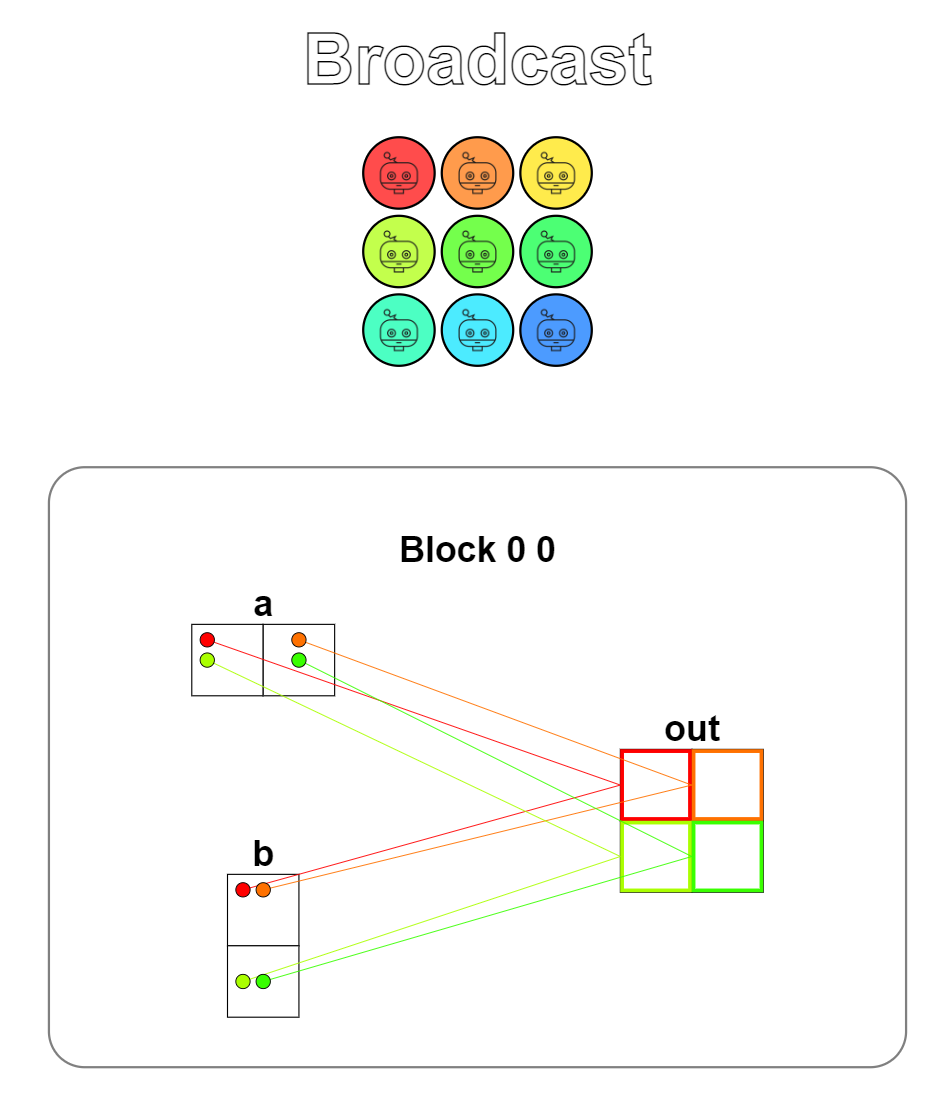
题目:Broadcast。广播操作,一个列向量与一个行向量相加,结果将会自动广播为一个矩阵,本题用了二维的Thread,注意行、列向量是一维的,需要理解输入输出数据的映射关系。
1
2
3
4
5
6
7
8
| def broadcast_test(cuda):
def call(out, a, b, size) -> None:
local_i = cuda.threadIdx.x
local_j = cuda.threadIdx.y
if local_i < size and local_j < size:
out[local_i, local_j] = a[local_i, 0] + b[0, local_j]
return call
|
可视化结果如下,行向量数据映射到矩阵中的每一行,列向量数据映射到矩阵中的每一列。
Puzzle 6
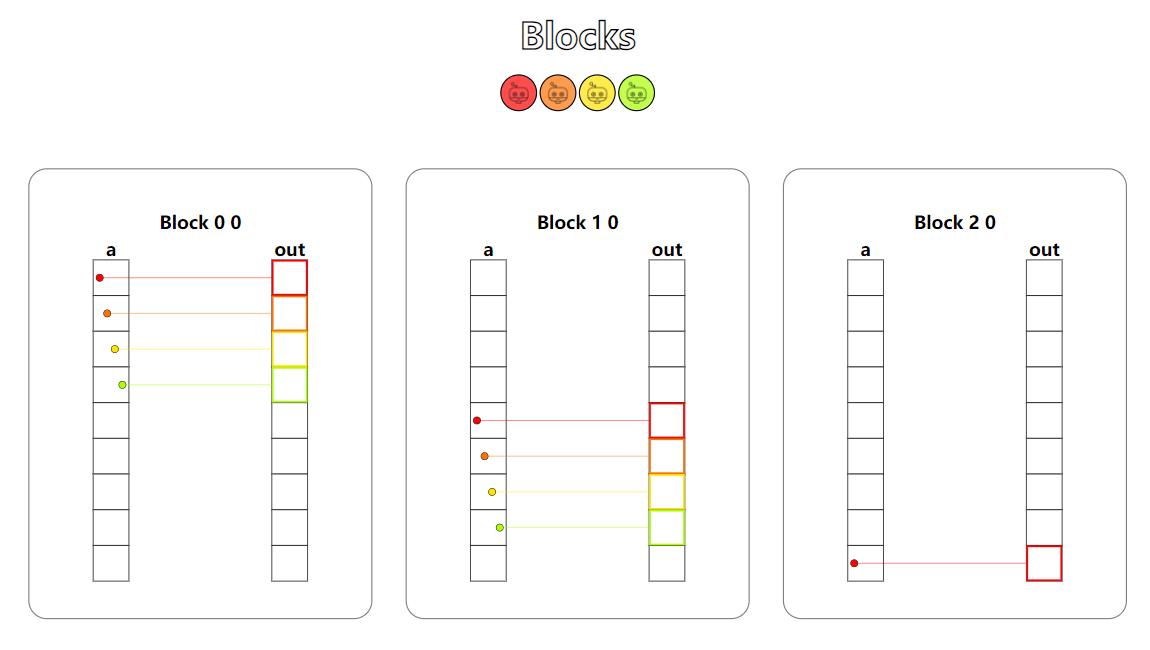
题目:Blocks。在CUDA中,每一个Block内线程的数量是有限制的,为了使用更多的线程,我们可以增加更多的Block。本题开始,核函数不再只使用一个Block了,此时我们需要考虑数据在Block间的跨度和Block内线程对数据的索引关系。
1
2
3
4
5
6
7
| def map_block_test(cuda):
def call(out, a, size) -> None:
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
if i < size:
out[i] = a[i] + 10
return call
|
从可视化结果中看到,我们有多个Block,每个Block中都有相同数量的线程。考虑数据索引时,我们需要将Block间的索引也考虑上,与二维数组的索引相似,Block和Thread组成了二维的索引关系。
Puzzle 7
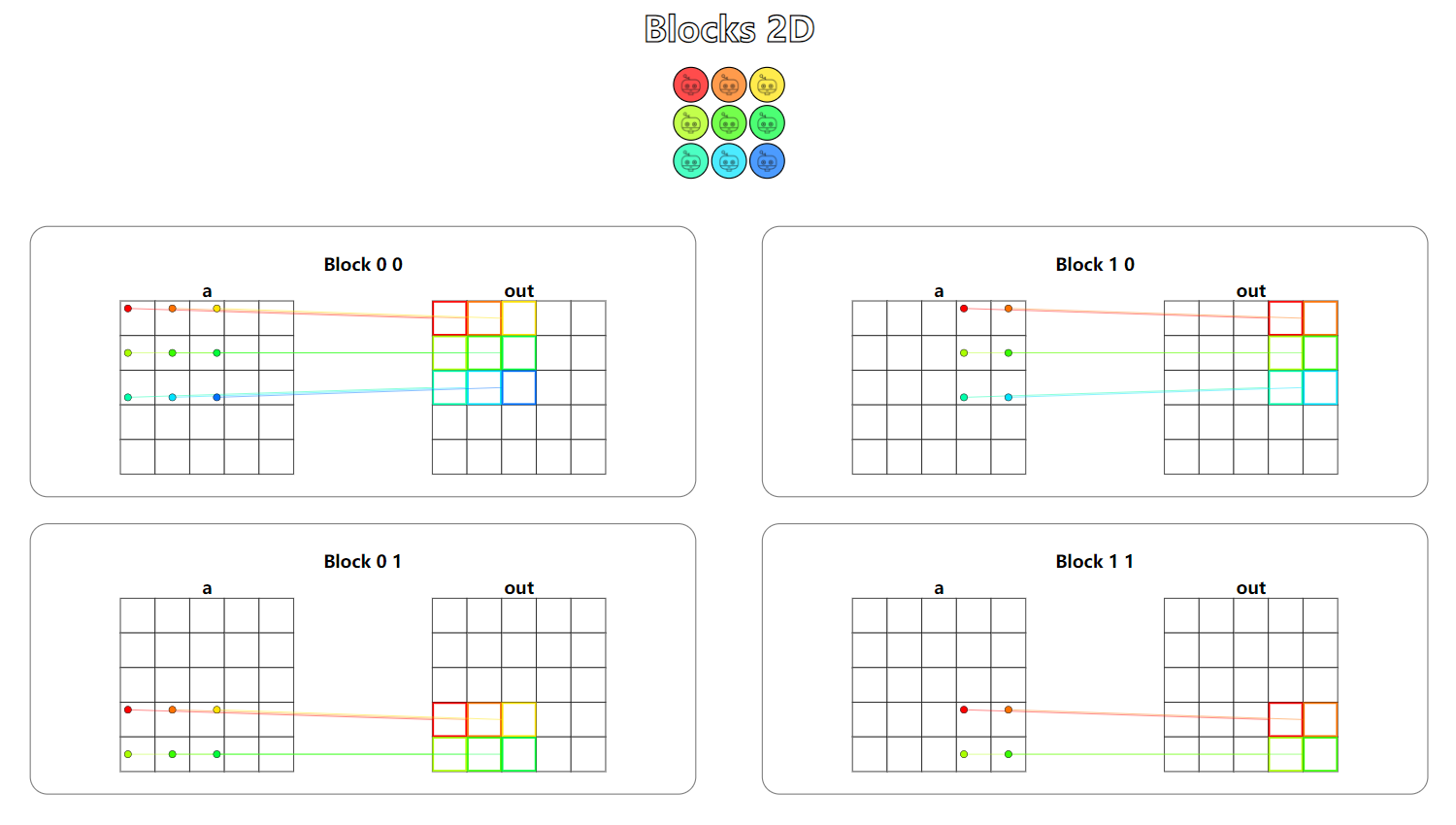
题目:Blocks 2D。二维的Block加上二维的Thread,这是实际应用中最常见的场景。
1
2
3
4
5
6
7
8
| def map_block2D_test(cuda):
def call(out, a, size) -> None:
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
j = cuda.blockIdx.y * cuda.blockDim.y + cuda.threadIdx.y
if i < size and j < size:
out[i, j] = a[i, j] + 10
return call
|
从可视化结果中可以看到,每一个Block负责处理矩阵a中的一部分数据,一个大矩阵就这样被切分为几个小矩阵,分别进行数据操作,最后写回到输出中。
Puzzle 8
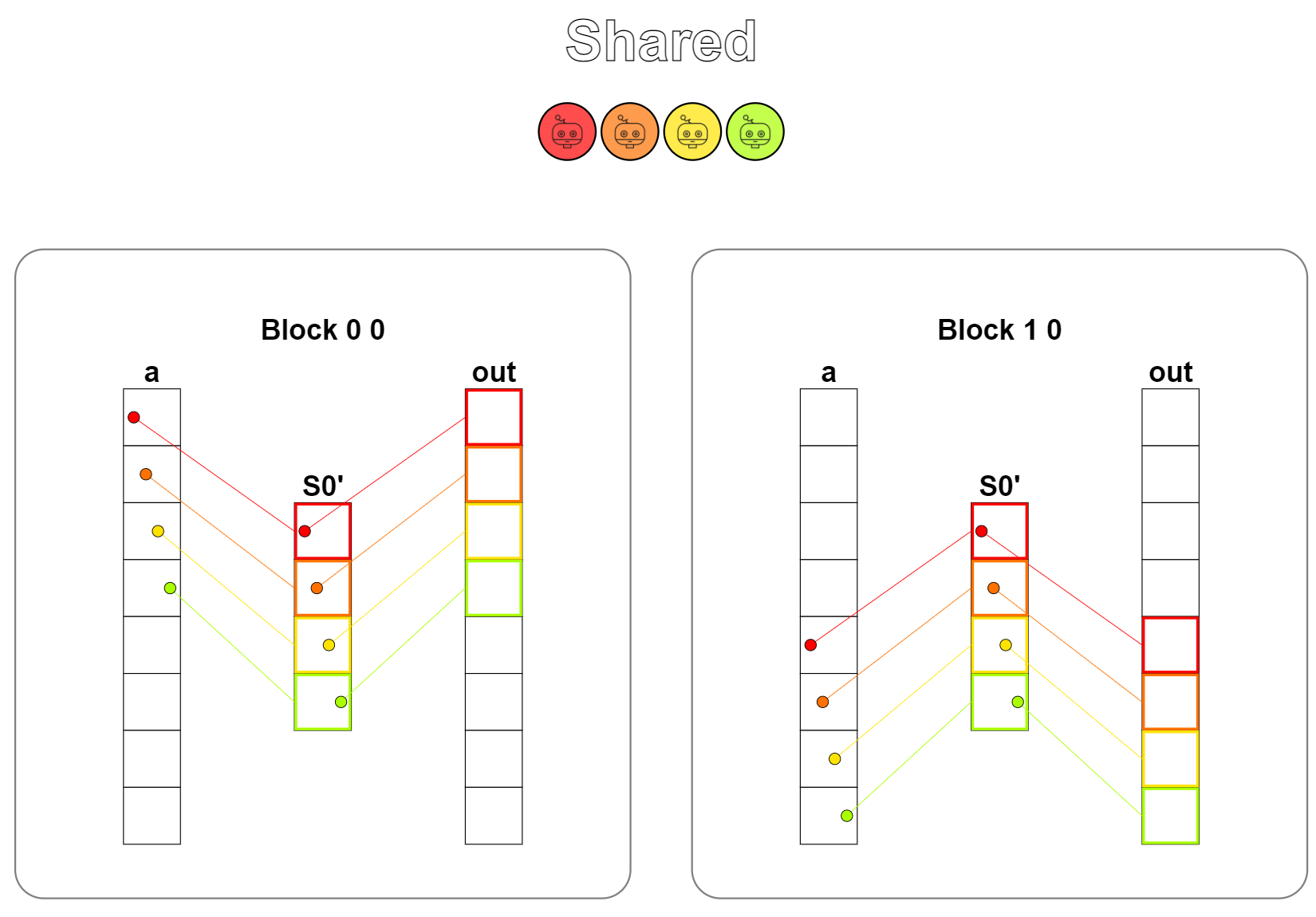
题目:Shared。本题是Shared memory(共享内存)的第一次使用,共享内存是SM中的片上内存,实际上是开放给开发人员自由编程的一种L1缓存,读写的速度要比全局内存快很多倍,当核函数需要频繁、重复地读取一部分数据进行运算时,先将这一部分数据从全局内存中读取到共享内存中,能够提升非常多倍的性能。
本题其实不用共享内存也可以,只是给大伙演示一下共享内存是如何使用的。
使用共享内存的操作一般为:从全局内存中读取数据并储存到共享内存中,显示地同步内存,保证所需的数据已正确存放到共享内存中,从共享内存中读取数据并进行计算,将结果写回到全局内存的输出中。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
|
TPB = 4
def shared_test(cuda):
def call(out, a, size) -> None:
shared = cuda.shared.array(TPB, numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
if i < size:
shared[local_i] = a[i]
cuda.syncthreads()
shared[local_i] = shared[local_i] + 10
out[i] = shared[local_i]
return call
|
从可视化结果中看到,存在一个数据从全局内存中加载到共享内存上的一个操作,计算完成后将结果写回到全局内存的输出中。
Puzzle 9
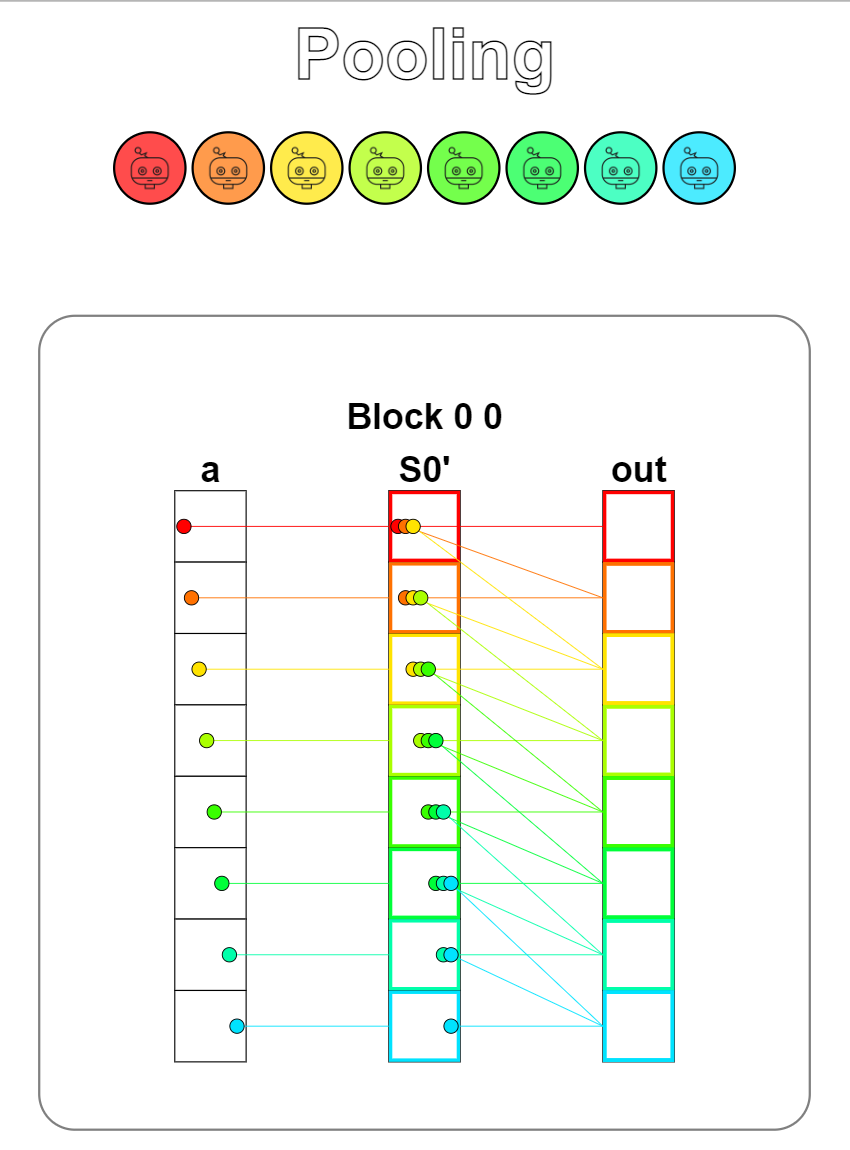
题目:Pooling。一维池化操作,池化核大小为3,需要将数组上相邻的三个元素相加,因此需要频繁地读取数据,此时使用共享内存就很有必要了。题目给的共享内存大小正好能将输入的数组a完全装下,将输入完全搬运到共享内存上后,每条线程将其相邻的三个元素相加,将结果写回输出即可。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| TPB = 8
def pool_test(cuda):
def call(out, a, size) -> None:
shared = cuda.shared.array(TPB, numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
if i < size:
shared[i] = a[i]
cuda.syncthreads()
acc = 0
for j in range(3):
if local_i - j >= 0:
acc = acc + shared[local_i - j]
out[i] = acc
return call
|
从可视化结果中可以看到,读取数据的次数远多于写入数据的次数,使用共享内存能带来非常大的性能提升。同时共享内存大小能装下数组a,省去了判断数据是否存在于共享内存中的判断。
Puzzle 10
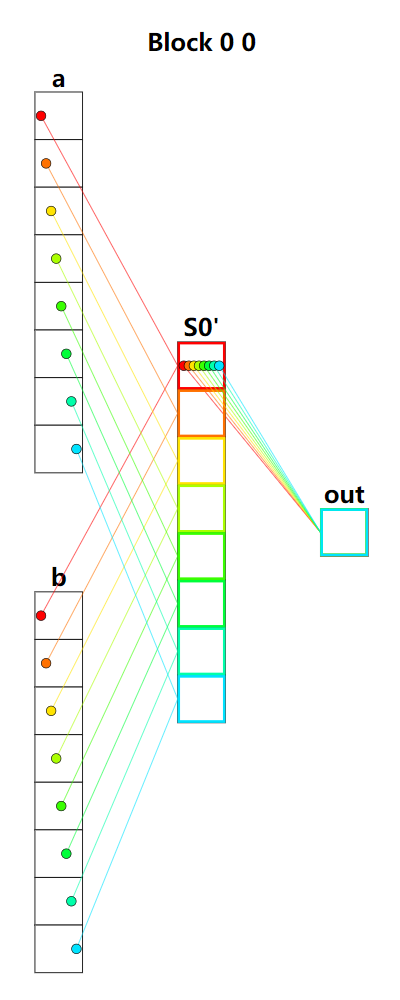
题目:Dot product。点乘,将向量a和b中对应位置元素相乘,最后相加。整体运算可以分为两个阶段,第一阶段是元素相乘,可以将数据加载到共享内存上的同时完成相乘的操作,第二阶段是元素的规约运算,将共享内存上的所有元素进行规约相加,也就是reduce_sum。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| TPB = 8
def dot_test(cuda):
def call(out, a, b, size) -> None:
shared = cuda.shared.array(TPB, numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
if i < size:
shared[local_i] = a[i] * b[i]
cuda.syncthreads()
stride = size // 2
while stride != 0:
if local_i < stride:
shared[local_i] = shared[local_i] + shared[local_i + stride]
stride = stride // 2
out[0] = shared[0]
return call
|
可视化结果看不出数据读写的顺序,首先是从数组a和b中读出元素相乘,并存放到共享内存中,然后将共享内存上所有元素规约相加到共享内存的第一个元素中,最后将结果写回到输出。
Puzzle 11
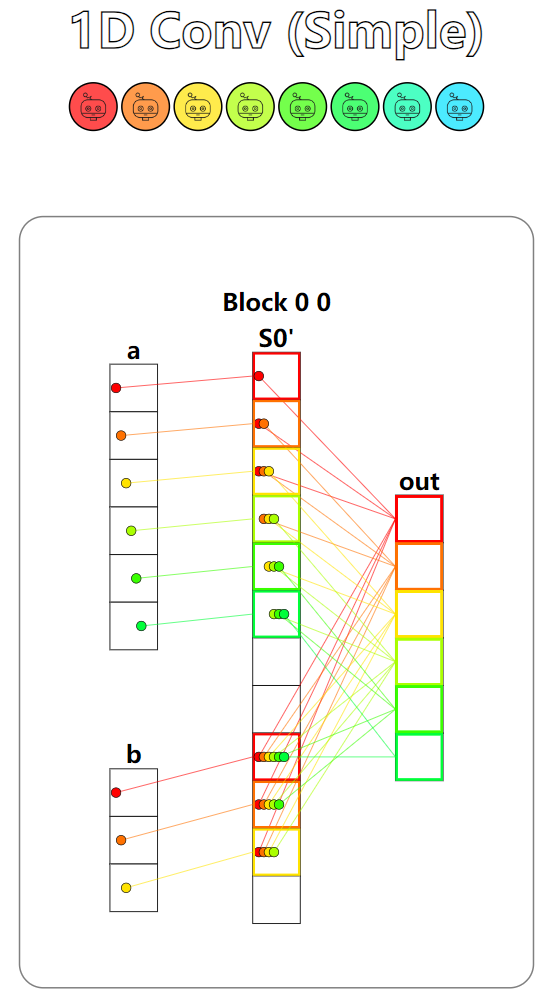
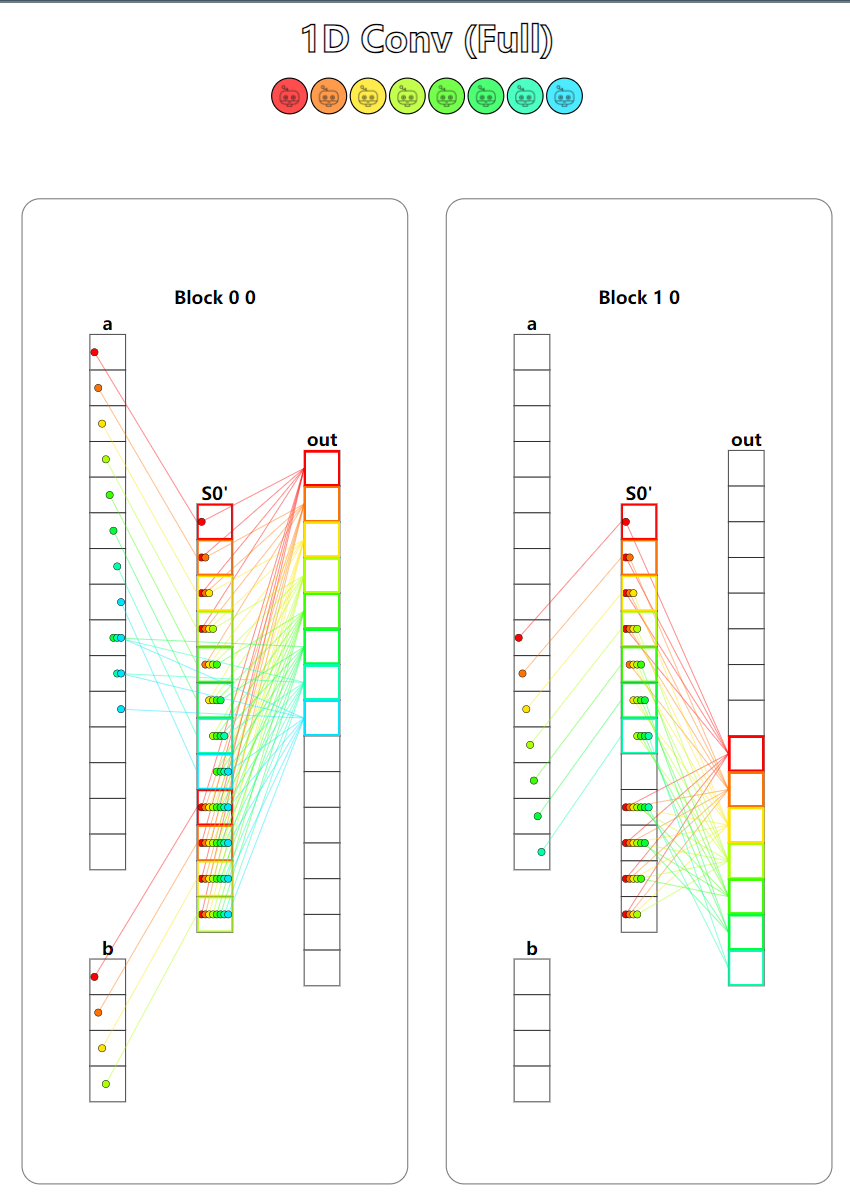
题目:1D Convolution。一维卷积运算,本题中的共享内存大小不足以存放下输入的所有元素,因此我们需要判断数据是否在共享内存上,对于不在共享内存上的数据,我们只能从全局内存中读取并计算。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
| MAX_CONV = 4
TPB = 8
TPB_MAX_CONV = TPB + MAX_CONV
def conv_test(cuda):
def call(out, a, b, a_size, b_size) -> None:
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
shared = cuda.shared.array(TPB_MAX_CONV, numba.float32)
if i < b_size:
shared[local_i + TPB] = b[i]
if i < a_size:
shared[local_i] = a[i]
cuda.syncthreads()
acc = 0
for j in range(b_size):
if i + j < a_size:
if local_i + j < TPB:
acc = acc + shared[local_i + j] * shared[TPB + j]
else:
acc = acc + a[i + j] * shared[TPB + j]
out[i] = acc
return call
|
本题有两个测试用例,第一个测试用例只使用了一个Block,并且输入和卷积核都能够全部载入到共享内存中。第二个测试用例使用了2个Block,并且输入并不能完全载入到共享内存中。
Puzzle 12
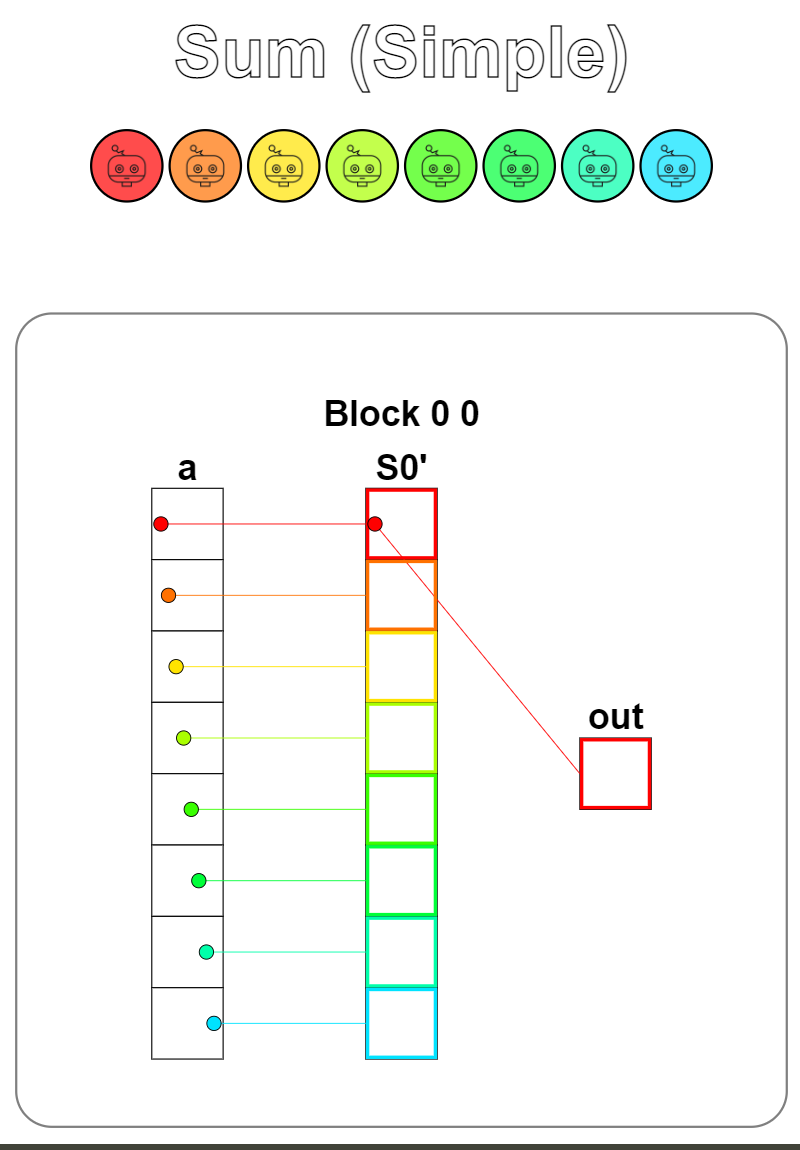
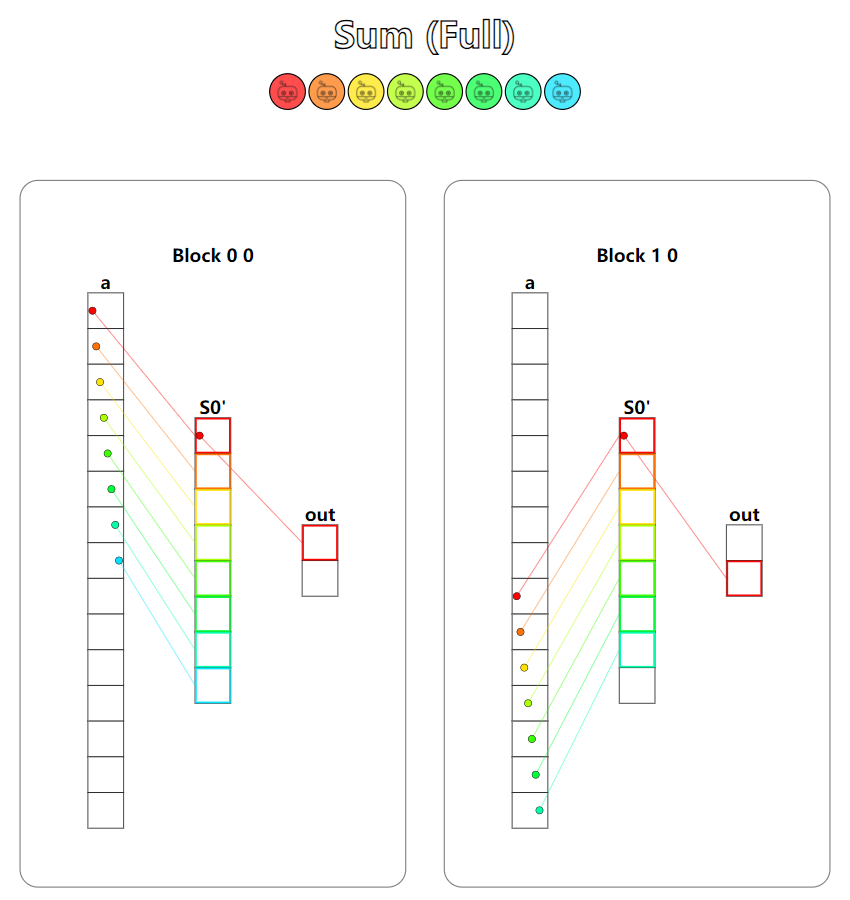
题目:Prefix sum。前缀和,其实就是规约求和,题目要求的是相邻线程相加,与第十题中使用到的规约计算方法稍有不同,相邻线程相加的情况下stride是从小到大增长的。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
| TPB = 8
def sum_test(cuda):
def call(out, a, size: int) -> None:
cache = cuda.shared.array(TPB, numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
if i < size:
cache[local_i] = a[i]
cuda.syncthreads()
stride = 1
while stride != TPB:
if local_i % (stride * 2) == 0:
cache[local_i] = cache[local_i] + cache[local_i + stride]
stride = stride * 2
if local_i == 0:
out[cuda.blockIdx.x] = cache[0]
return call
|
可视化图并看不出共享内存中的规约操作,图个乐就好。第二个测试用例中的输出如果要进一步求和,可以再进行一次规约操作,也称为两阶段式的reduce。
Puzzle 13
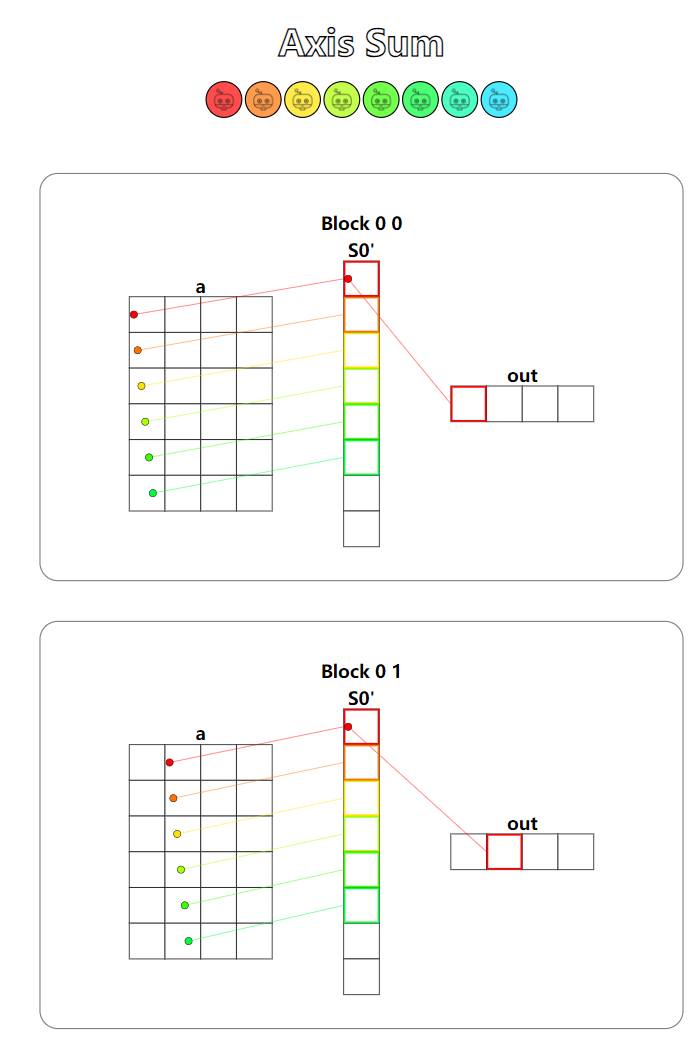
题目:Axis sum。同样是reduce_sum,不过本题支持的是任意轴上的规约操作,不同的地方在于要正确处理输入加载到共享内存上的下标映射关系。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| TPB = 8
def axis_sum_test(cuda):
def call(out, a, size: int) -> None:
cache = cuda.shared.array(TPB, numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
batch = cuda.blockIdx.y
if i < size:
cache[local_i] = a[batch, i]
cuda.syncthreads()
stride = TPB // 2
while stride > 0:
if local_i < stride:
cache[local_i] = cache[local_i] + cache[local_i + stride]
stride = stride // 2
if local_i == 0:
out[batch, 0] = cache[0]
return call
|
可视化图太长了,截图不完全,其实与上一题多Block下的规约计算是一样的。
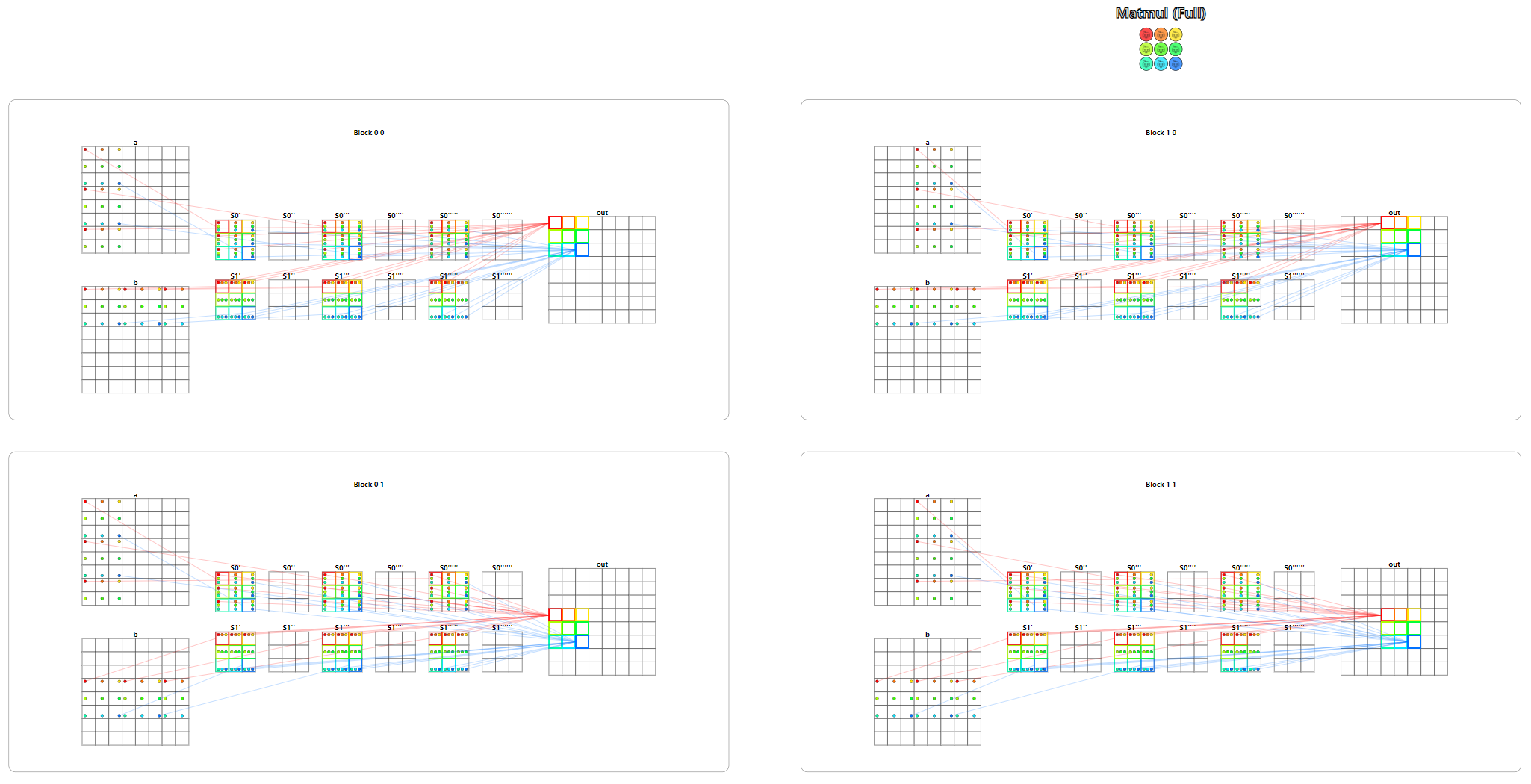
Puzzle 14
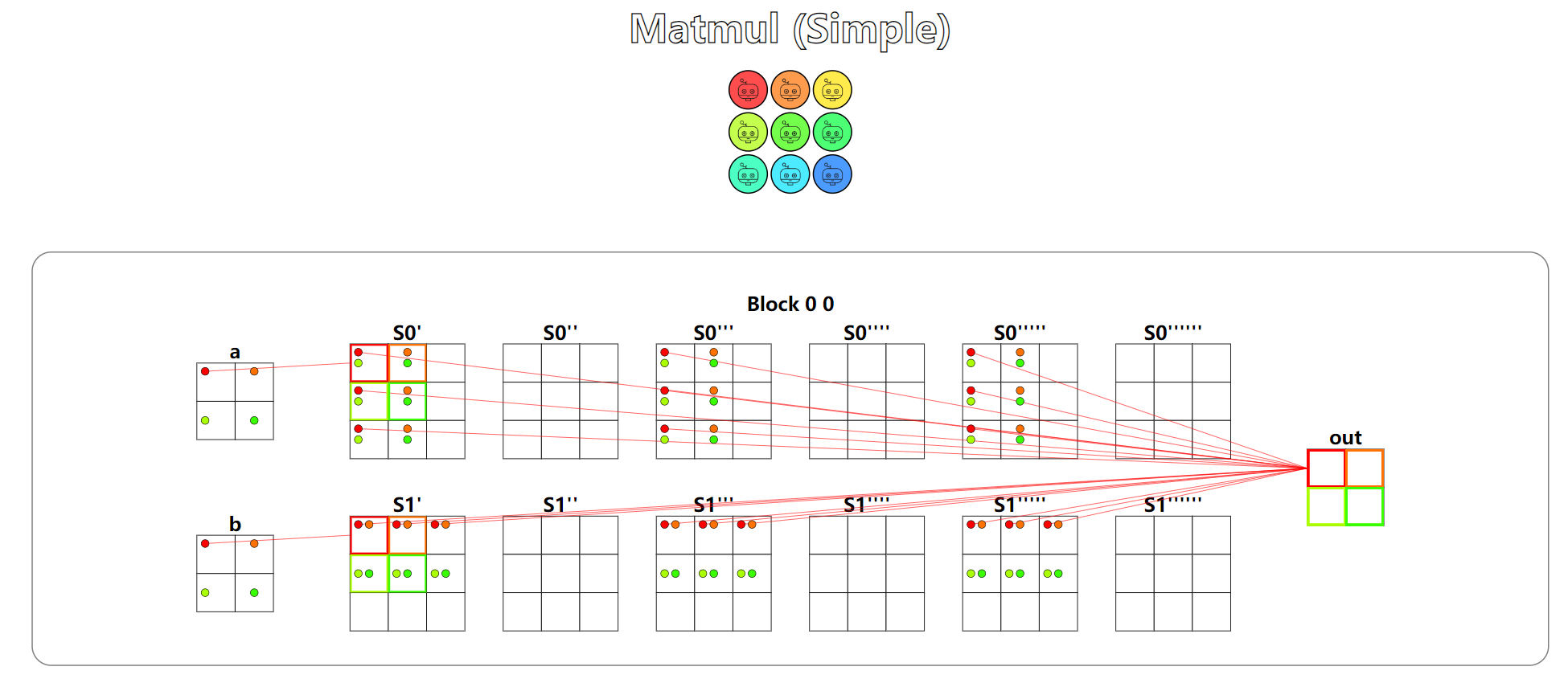
题目:Matrix multiply。矩阵乘法,非常经典的带共享内存版本的矩阵乘法,使用两个共享内存矩阵,用于储存矩阵的局部数据,并在这局部数据上进行矩阵相乘,将结果写到全局内存的输出中。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
| TPB = 3
def mm_oneblock_test(cuda):
def call(out, a, b, size: int) -> None:
a_shared = cuda.shared.array((TPB, TPB), numba.float32)
b_shared = cuda.shared.array((TPB, TPB), numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
j = cuda.blockIdx.y * cuda.blockDim.y + cuda.threadIdx.y
local_i = cuda.threadIdx.x
local_j = cuda.threadIdx.y
acc = 0
for blockId in range(cuda.blockDim.x):
if i < size and (blockId * cuda.blockDim.y + cuda.threadIdx.y) < size:
a_shared[local_i, local_j] = a[i, blockId * cuda.blockDim.y + cuda.threadIdx.y]
else:
a_shared[local_i, local_j] = 0.0
if j < size and (blockId * cuda.blockDim.x + cuda.threadIdx.x) < size:
b_shared[local_i, local_j] = b[blockId * cuda.blockDim.x + cuda.threadIdx.x, j]
else:
b_shared[local_i, local_j] = 0.0
cuda.syncthreads()
for k in range(cuda.blockDim.x):
acc = acc + a_shared[local_i, k] * b_shared[k, local_j]
cuda.syncthreads()
if i < size and j < size:
out[i, j] = acc
return call
|
测试用例同样有两个,第一个用例中共享内存的大小比矩阵要大,使用一个Block便可以完成计算。第二个用例中矩阵要大于共享内存的大小,此时就需要分片加载,计算局部矩阵和,最后将结果累加写回到输出。
总结
对于初学者来说,前九题的难度还是十分友好的,第十题开始需要更深入的理解,配合可视化图,花点时间也能完全理解。使用Python编写核函数的方法也降低了学习成本,通过一题之后的小动物视频很有趣。总而言之是一个宝藏小仓库,值得给仓库作者点一个小星星。